立创业思想 做创新研究Drive Machine Drive World


作者简介:
张抗抗,清华大学2004级汽车工程系本科、博士,期间在清华大学经管学院拿到本科第二学位。博士毕业后就职上汽乘用车功能安全工程师,2015年选择自主创业,目前为北京紫晶立方科技有限公司联合创始人。
研究方向:电动汽车、锂电池、功能安全、3D打印。

作为目前国内最具热度的新能源车型之一,荣威Marvel X上市后受到了行业内外人士的关注,尤其是对其优秀续航能力的关注。
具体来看表现在两方面:一方面,体现在绝对数值上的领先。工信部百公里电耗仅为14.2kWh,是国内第一个向国际标杆发起挑战的量产车型(详细对比可在知乎上搜索《如何评价上汽荣威光之翼量产版Marvel X?》文章);另一方面,其续航性能的适应性较强。也就是说,与官方续航相比,其实际续航的缩水并不多。上汽荣威曾邀请两位大V @康贱猫 @sunflowerzzz 在南京-上海进行实际测评(具体情况可在知乎上搜索《上汽荣威:上汽荣威Marvel X顺利完成“上海-南京”续航实测》文章)。
那么,像荣威Marvel X这样采用双电机的动力系统是否一定省电?下面从技术的角度进行解析。
双电机省电原因的朴素解释
大家都用的相似的锂离子电池、高性能的永磁同步电机,那Marvel X有哪里不一样呢?是不是后轮双电机方案暗藏玄机,能够提高效率、增加续航?
双电机能提高效率,不假思索的情况下,很容易给出朴素的解释:
· 低扭下单电机出力: 避免“大马拉小车”的效率损失。
· 双电机取长补短:把一个工况点拆为两个工况点的加和,只要拆得合理,总能找到更高效的组合。
这两个解释是相当符合直觉的,足以满足大多数群众的好奇心。
不仅仅是普通吃瓜群众,一段时间以来,这在学术界也是相当主流的一个观点。例如:
· 同济大学汽车学院院长余卓平教授,于2005年在《同济大学学报》上的仿真结果认为[1]:四电机(与双电机没有本质区别)电动汽车,在高转矩需求时应平均分配转矩,在低转矩需求时应关闭前轮/后轮电机,以获得更高的效率。
· 俄亥俄州立大学王俊敏教授,于2011年在《Journal of Power Sources》上发表论文[2]。论文[3]认为论文[2]表达了相似的观点:在低转矩需求时应关闭前轮/后轮电机,以获得更高的效率。
< Journal of Power Sources >影响因子6.9,对车辆工程领域来说,这很高了
若这两个解释成立,那特斯拉Model系列、蔚来ES8的前后双电机,从原则来上说并没有本质区别,也应该是满足双电机省电的原理的喽?
然而,符合直觉的解释,未必是完全正确的!其正确性依赖一些条件。
不患寡而患不均的凸性电机
为了方便分析,我们画了一个永磁同步电机的损耗函数示意图:横坐标为有效的输出转矩,纵坐标为损耗的功率(转矩)。
从下图可以看到,当输出转矩变大时,损耗功率不仅变大,而且变大的速度也在增加(就像十年前的房价一样)。这是因为:电机铜耗是电流的平方函数。类比的,可理解为焦耳定律:发热量 = 电流的平方 * 电阻。
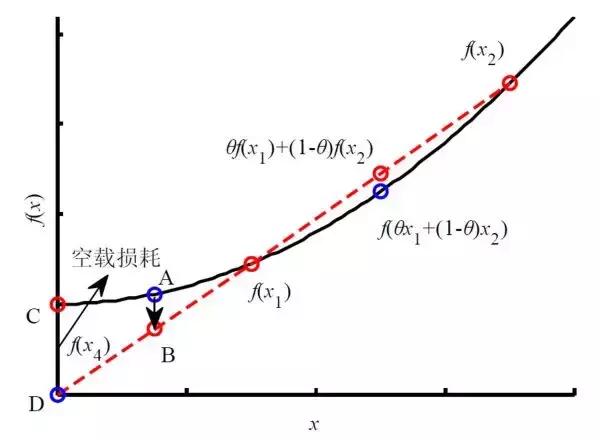
横坐标为有效的输出转矩,纵坐标为损耗的功率(转矩)
· 当转矩需求较大,电机工作在最右边的那个蓝色工况点时,我们会发现一个现象:当以x=x1+x2的约束去拆分转矩时,损耗功率总是变得更大(红点在蓝点上方)!这也就是论文[1]的第一个结论:在高转矩需求时应平均分配转矩。
· 当转矩需求较小,电机工作在A处的蓝色工况点时,我们会发现一个现象:当以x=x1+x2的约束去拆分转矩时,让一个电机工作在f(x1)处,另外一个电机在D点停止工作,那么损耗功率会变得更小(红点B在蓝点A的下方)。这似乎验证了论文[1]的第二个结论:在低转矩需求时应关闭前轮/后轮电机,以获得更高的效率。
然而,这里有一个Bug,即:当永磁同步电机停止工作时,它的损耗功率是不是0呢?
其实,所谓的“关闭电机”,也分两种情况:
· 若电机与车轮能够脱开,电机自动空转,损耗功率为0,工作在图中的D点。
· 若电机与车轮保持接合,电机倒拖转动,损耗功率不为0,工作在图中的C点。具体来说,主要的损耗是“铁耗”,即使电流为0,只要还在转动,永磁同步电机的铁耗就不能避免。
也就是说,论文[1]与[2]的结论成立需要一个前提:前/后轮的电机可以与车轮(无损失)脱开。
若电机不能与车轮脱开,转矩分配策略会变得很有意思 —— 无论在任何转矩需求下,双/四电机都是“平均分配转矩”为效率最优策略。但是,红点最多是与蓝点重合,也就是说排除掉电机性能等级不同的因素,双电机“平均分配转矩”不会比单电机更优!
但是前后双电机可以有更好的“抓地力”,以达到更强的加速性能。
进一步数学抽象:转矩的时间/空间分配问题
在回到荣威Marvel X的话题之前,我们在理论层面再多讲几句。
“平均分配转矩”策略,与“猛踩油门和匀速行驶哪种更费油?”的问题,在数学层面是相似的,都是凸优化问题。

小学时,我们就研究过这样一个简单的问题:
周长为1的长方形,面积最大是多少?
小学时一般是凑出来的,在凑的时候会发现:如果让短边长一些,那长边就会短一些,是此消彼长的关系。凑到之后惊奇的发现:当长边与短边相等的时候,也就是正方形的面积最大!
为什么呢? 长方形也懂得不患寡而患不均的道理吗?
长大后了解到,这是一个二次函数求极值的问题0:
f(x)=x*(0.5-x)=-x^2+0.5x
进一步推广,这是一个凸优化问题。如下图,对于凸函数下式恒成立:
f(\theta*x_{1}+(1-\theta)*x_{2})\leq f(\theta*x_{1})+f((1-\theta)*x_{2})

换成具体的例子就是:
· 转矩的时间分配问题:猛踩油门再滑行一阵子,要比匀速行驶费油(电)!
· 转矩的空间分配问题:“平均分配转矩”的策略,要比其他的所谓复杂策略更优。
以上结论需要满足一个前提条件:动力源损耗函数是凸函数。
荣威Marvel X的双电机方案,有何不同?
从数学世界回到现实世界,关于双电机能否提高效率的问题,大家是不是有如火眼金睛一般,一下子就可以看到关键因素了?
并不是所有的双电机方案都能提高效率,增加续航。这取决于以下两个条件,至少要满足其中之一:
· 非凸的电机损耗特性:永磁同步电机可通过增加离合器来实现;而特斯拉与蔚来ES8所使用的感应异步电机,无励磁时无铁损,本身就是非凸的(注:我对感应异步电机的特性不熟,此点待考证)。
· 双电机的效率特性差异较大:永磁同步电机可通过其中一个电机增加换挡机构实现;特斯拉的Model 3则是使用永磁同步 + 感应电机的方式来实现;蔚来ES8使用的是前后相同的电机,无此差异性。
特斯拉Model S、Mode D、蔚来ES8虽然是前后相同的双电机,并不是吃饱撑的,而是为了实现更大的“抓地力”,以达到极限的加速性能。可以估算,非四轮车在0.8的路面上极限加速性能约为5.5s。
对应上述两个条件,荣威Marvel X满足:
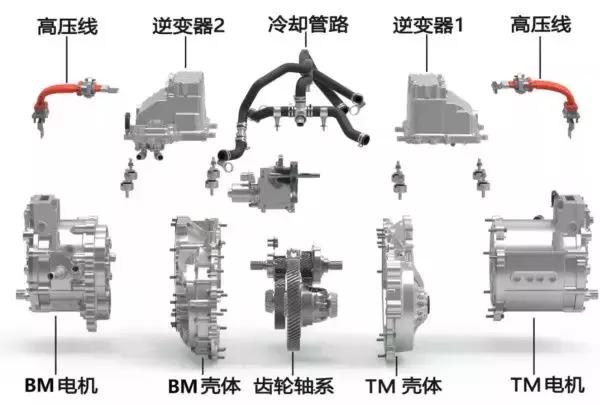
· 后轮双电机由85kW的主电机与52kWh的辅助电机组成,辅助电机可以断开——满足非凸的电机损耗特性。
· 后轮双电机的辅助电机有两个挡位 —— 满足双电机的效率特性差异较大。
辅助电机的双挡位,最显著的一个好处是,在高速巡航的时候切入高速挡,缓解“电动汽车高速下续航大幅降低”的问题。
咱们已经道透了本质,再举例分析就显得多余了。若还是想看举例分析,可以看荣威的官方分析。
用特斯拉70%的电量,MARVEL X实现了相近的实际续航 mp.weixin.qq.com
荣威Marvel X的双电机方案,有何难点?
既然续航是电动汽车的核心问题,而后轮双电机方案有显著的作用,那么为何别家不做呢?
第一, 硬件上系统集成难度比较大
本来单电机就能解决的问题,现在却需要增加1个离合器、1个二挡变速箱等等。开发风险大为增加,这绝不在造车新势力的考虑范围之内。
如果对特斯拉比较了解的人应该知道,特斯拉最早是考虑过二挡变速箱方案的,然而集成难度所增加的风险,差点害死了特斯拉。
而上汽早在荣威550plug-in等混动项目上,就完成了对自主研发的EDU系统的验证、积累了经验,所以不怕再弄这个相似的系统。
第二, 软件上系统标定难度比较大
辅助电机的脱开、接合,二挡变速箱的换挡,会带来平顺性、可靠性等问题,非常考验标定的技术。上汽在荣威550plug-in项目上,花了一两年时间才标定顺畅,积累了丰富的经验。现在再应用到Marvel X上,自然是驾轻就熟。
同样的,造车新势力不会采取这种技术方案,风险太大了。
第三, 系统复杂带来的可靠性问题
系统复杂了,实现相同的可靠性,难度自然会增大。这不仅对造车新势力是个挑战,对上汽也是一个挑战,这也是它代表自主品牌向高端车型发起冲击的必经之路。
参考文献:
[1] 余卓平,张立军,熊璐.四驱电动车经济性改善的最优转矩分配控制[J]. 同济大学学报:自然科学版,2005(10):1355-1361.
[2] Wang R, Chen Y, Feng D, et al. Development and performance characterization of an electric ground vehicle with independently actuated in-wheel motors[J]. Journal of Power Sources, 2011, 196(8): 3962-3971.
[3] 卢东斌, 欧阳明高, 谷靖, 等. 四轮驱动电动汽车永磁无刷轮毂电机转矩分配[J]. 清华大学学报: 自然科学版, 2012, 52(4): 451-456.
文|张抗抗
转自-2030出行研究室-网页
地址:湖北省武汉市洪山区珞喻路1037号 邮箱:weixu@hust.edu.cn 传真:18672395238 联系人: 徐伟
版权所有:华中科技大学CECS能量转换系统研究组